创新团队
一、研究重点
1.渔用机器人应用基础研究
2.渔业养殖机器人技术
3.渔业捕捞、加工机器人技术
二、团队首席

谌志新,研究员,所首席科学家、副所长,全国农业科研杰出人才、上海市领军人才、国家现代农业产业藻类技术体系岗位科学家。牵头创制了全球首艘10万吨级大型养殖工船“船载舱养”模式,养殖作业装备核心人员。主持“921载人航天工程”高海况应急打捞回收系统装备研制、国家重点研发计划“深远海大型养殖装备平台与智能养殖模式”、公益性(农业)行业科研专项“渔业节能关键技术研究与重大装备研发”等国家和省部级项目课题10多项,研发推广了系列标准化渔船和远洋高效捕捞成套装备。获军队科技进步奖、全国农牧渔业丰收奖、上海市科技进步、神农中华农业科技奖、中国水产学会范蠡奖和中国航海学会等省部级科技奖近10项,主参编专著3本,授权专利、软著50多项,技术成果在推动渔村产业振兴方面发挥了重要科技引领作用。
三、团队建设
团队(隶属捕捞室)聚焦智慧渔业发展方向,主要开展渔用机器人应用基础研究、无人化作业系统研发与养捕加作业机器人研制,重点从事渔用机器人的共性关键技术、作业功能和典型场景应用等领域的研究。建立“首席科学家+学科带头人”的人才协同创新培养机制,目前共有9名科研人员,其中研究员2人,副研究员1人,专业涵盖信号处理、算法开发、人工智能和机械结构等学科。
四、近期的主要工作
围绕方向1:深远海舱-网环境下渔业机器人自主定位导航与底盘设计的共性关键技术
围绕深远海渔业机器人自动化、无人化的导航需求,针对水下鱼-机扰动、低光照等复杂工况的挑战,开展渔业机器人在深远海舱-网场景下的自主贴附移动研究。开展场景三维测绘与重构研究,突破深远海舱-网场景地理信息提炼技术;开发深远海舱-网建图与匹配定位系统,融合机器人视觉/惯导等多源感知信息,解算机器人贴附移动的轨迹偏离度;研发机器人循迹过程中障碍物智能识别系统技术,实现自主移动过程中的局部避障;开发渔业机器人自主规划路径的决策技术,形成渔业机器人自主定位移动的导航系统。针对恶劣的水下环境条件,设计耐腐蚀、耐高压和抗海水侵蚀的机器人移动底盘结构,优化工船磁力吸附,确保机器人能够在复杂的水下环境中自由移动和执行任务。
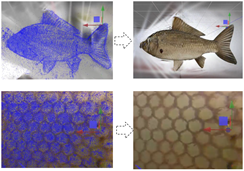
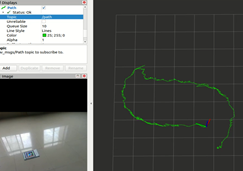
单一视角下的网箱鱼体立体测绘与渲染成像 标志物引导的移动定位轨迹
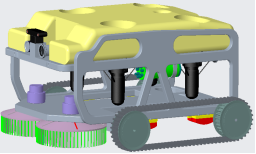
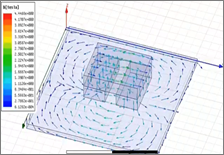
工船磁力吸附机器人 磁力模组吸附磁场分布
围绕方向2:深远海养殖机器人鱼情巡检感知与清洗作业管理决策平台
针对养殖场所全方位鱼情监测需求,研究深远海养殖场景下的巡检机器人。设计检测鱼体的多源框架模型,提取鱼体动作,评估健康活跃度;引入基于跟踪轨迹的异常动作分析方法,实现对鱼群视频流的实时状态监测。设计深度学习检测网络,检测机器人巡视过程中的舱-网附着物,基于清洁巡视数据,在云端后台构建深远海养殖舱-网全场景的附着物大数据立体展示模型。设计清洗作业机器人空化射流清洗装置的三维模型,优化喷嘴形状、空间布局、射流角度,利用计算流体力学技术分析射流在水中的传播特性,评估空化射流作业技术对生物附着物的去除效率及清洁效果;结合后台清洁大数据观测云平台,综合考虑清洗效果、能耗和经济性,确定适合深远海养殖附着物强度的空化射流清洗强度和频率,形成渔业机器人自主清洗决策的管理体系。
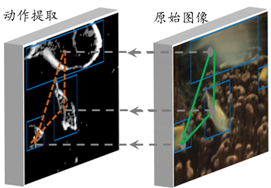
鱼体动作提取 鱼体移动轨迹
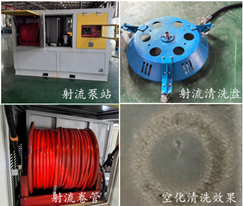
舱网附着物空化射流清洗装备
围绕方向3:捕捞机器人复杂动态场景下的鱼体计数
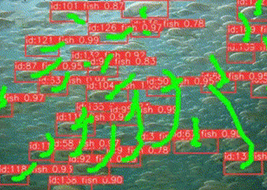
围绕活鱼起捕后的自动计数需求,研究高效的智能计数系统。通过高分辨率摄像装置实时捕获活鱼图像,利用特征提取、对象检测与深度学习算法对鱼体进行识别与计数,并与后台执行作业机构联动控制。为提升计数的准确性与适应性,研究不同光照、水质等复杂环境下的图像分割与目标跟踪算法。为确保系统能够在鱼群密集或部分鱼体重叠遮挡情况下的高识别率,在数据处理方面,结合空间深度信息,构建距离梯度-阈值引导的注意力学习机制。起捕计数系统支持与后台管理平台的无缝对接,通过大数据技术实现计数信息的实时上传和后台分析决策,助力渔业起捕的数字化管理与决策优化。

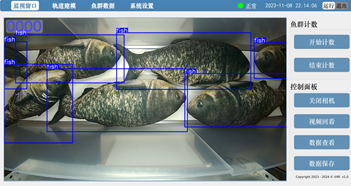
真空吸鱼泵 鱼体转运计数软件


 沪公网安备 31011002002435号
沪公网安备 31011002002435号